ISIS project: Sensor Fusion
This project is carried out by Division of Automatic Control and Communication Systems in cooperation with SAAB Aerospace, SAAB Bofors Dynamics and NIRA Dynamics.Selected publications
F. Gustafsson, F. Gunnarsson, N. Bergman, U. Forssell, J. Jansson, R. Karlsson, and P-J. Nordlund. Particle filters for positioning, navigation and tracking. IEEE Transactions on Signal Processing, Vol. 50, Nr. 2, 2002. pdf-file.N. Persson, F. Gustafsson and M. Drevö. Indirect tire pressure monitoring using sensor fusion. In SAE 2002, Detroit, 2002. Report number 2002-01-1250. pdf-file.
P-J. Nordlund and F. Gustafsson. Recursive estimation of three-dimensional aircraft position using terrain-aided positioning. Proc. of ICASSP, Orlando, May, 2002. pdf-file
P-J. Nordlund, F. Gunnarsson and F. Gustafsson. Particle filters for positioning in wireless networks. Proc. of EUSIPCO (invited paper), Toulouse, France, September, 2002. pdf-file.
Urban Forssell, Peter Hall, Stefan Ahlqvist, Fredrik Gustafsson. Novel Map-Aided Positioning System. Proc. of FISITA, Helsinki, Finland, 2002. pdf-file.
Positioning using time-difference of arrival measurements. Fredrik Gustafsson and Fredrik Gunnarsson. ICASSP, Hongkong, PRC, 2003. pdf-file or ps-file.
Particle filter and Cramer-Rao lower bound for underwater navigation. Rickard Karlsson, Fredrik Gustafsson and Tobias Karlsson. ICASSP, Hongkong, PRC, 2003. pdf-file or ps-file.
Highlights 2002
Three licentiate theses were presented:
- Rickard Karlsson. Simulation Based Methods for Target Tracking. LIU-TEK-LIC-2002:930, Dept. of Electrical Engineering, Linköping University, Sweden, 2002.
- Per-Johan Nordlund. Sequential Monte Carlo filters and Integrated Navigation. LIU-TEK-LIC-2002:945, Dept. of Electrical Engineering, Linköping University, Sweden, 2002.
- Niclas Persson. Event Based Sampling with Application to Spectral Estimation. LIU-TEK-LIC-2002:981, Dept. of Electrical Engineering, Linköping University, Sweden, 2002.
-
F. Gustafsson, F. Gunnarsson, N. Bergman, U. Forssell, J. Jansson, R. Karlsson,
and P-J. Nordlund.
Particle filters for positioning, navigation and tracking.
IEEE Transactions on Signal Processing, 2002.
pdf-file.
-
Hall, Peter.
"A Bayesian approach to Map-Aided Vehicle Positioning".
NIRA Dynamics, LiTH-ISY-EX-3102, 2001.
A new company, NIRA Dynamics, entered ISIS and the sensor fusion project.
A workshop was organized on particle filters for navigation, including a plenary talk and three master thesis presentations at our three industrial partners. The workshop was attended by about 50 people.
Overview

|
|
The research in the area of sensor fusion
is focused on target tracking, navigation and positioning
applications.
The common denominator here is that these problems can be written as
non-linear state space models with non-Gaussian noise:
x(t+1) = f(x(t)) + w(t)
y(t)=h(x(t)) + e(t)
where the state vector contains position, velocity and other dynamical
states, and the measurements come form sensors as gyroscopes,
accelerometers, GPS, radar, etc.
The filtering problem is to estimate the states given the
measurements. The classical approach is to linearize the state space
model, to assume Gaussian noise and then applying the Kalman filter.
The particle filter provides a general algorithm for approximating
a posteriori distirbution of the states with arbitrary accuracy.
The framework is particular suitable for sensor fusion, where
sensor information of different kind is mixed with e.g.
information from digital maps.
We have the last few years developed efficient and robust particle filter algorithms to approximate the a posteriori distribution of the state vector, and applied the algorithms to a number of applications:
- Terrain navigation.
In this application an aircraft position is
autonomously determined by fusing measurements from an inertial
navigation system, a digital map and a radar altimeter. By
measuring the terrain height variations along the aircraft
flight-path and comparing these with a digital terrain map, a
position estimate of the aircraft is obtained. The comparison
between the map and the measurements is a nonlinear estimation
problem where unconventional and conceptually different sources of
information are fused together. Research as been focused on
finding a reliable and effective algorithm for this position
determination. See the paper
-
N. Bergman, L. Ljung, and F. Gustafsson.
Terrain navigation using Bayesian statistics.
IEEE Control System Magazine, 19(3):33 - 40, 1999.
pdf-file.
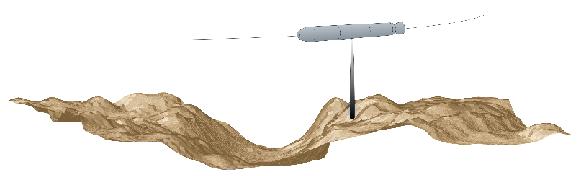
- Underwater navigation. The terrain navigation project has been
extended to underwater navigation using sonar depth
measurements. An underwater terrain map replaces the terrain
map above, and similar inertial sensors can be used.
The Cramer-Rao lower bound on the estimation accuracy has been
derived, and a simple interpretation is that
- Position accuracy = square root( velocity sensor variance * sonar
sensor variance / terrain variation)
See the image above, particle filter master theses overview and the conference paper
-
Rickard Karlsson, Fredrik Gustafsson and Tobias Karlsson.
Particle filtering and Cramer-Rao lower bound for underwater naviation.
ICASSP, Hongkong, PRC, 2003.
pdf-file or
ps-file.
- Map aided positioning for vehicles.
An approach similar to terrain navigation can be applied to cars, when
a street map is available. The velocity of the wheels is
compared to the street map, and after a few turns the correct
position is usually found.
See the
particle filter master theses overview, the
awarded master thesis summary (nonexisting link removed)
and the conference paper
-
Urban Forssell, Peter Hall, Stefan Ahlqvist, Fredrik Gustafsson.
Novel Map-Aided Positioning System.
Proc. of FISITA, Helsinki, Finland, 2002.
pdf-file.
- Target tracking. Target tracking algorithms for torpedos hunting ships using bearings-only measurement and for aircraft hunting ships using map information are presented in Rickard Karlsson's licentiate thesis. Also the data association problem has been studied.
- Mobile terminal positioning. A survey of tracking algorithms for
mobile terminals is given in
-
P-J. Nordlund, F. Gunnarsson and F. Gustafsson.
Particle filters for positioning in wireless networks.
Proc. of EUSIPCO (invited paper), Toulouse, France, September, 2002.
pdf-file.
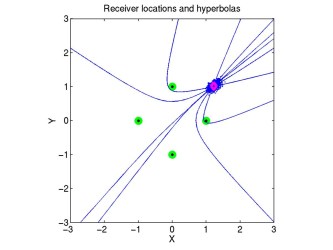
Positioning using time-difference of arrival measurements based on both a stochastic gradient algorithm and particle filter is described in
-
Fredrik Gustafsson and Fredrik Gunnarsson.
Positioning using time-difference of arrival measurements.
ICASSP, Hongkong, PRC, 2003.
pdf-file or
ps-file.
{kind=link}