 LiU Homepage
LiU Homepage
Optimization for Control
The research in optimization for control is focused on optimization modeling, robust control, model predictive control, and applications.
Optimization modeling
Within optimization modeling work is carried out to develop a software framework to simplify and unify development of optimization models. Many of the tricks of the trade in, e.g., robust optimization, can be automatized, i.e., the resulting optimization problems for robust control can be derived in an automatic fashion from a high-level description. The work is gathered in the language YALMIP implemented as a MATLAB Toolbox.
Robust control
Within robust control recent work is focused on reduced order robust controller design, model reduction, and robustness analysis. Our main focus is scalable algorithms for large-scale problems. Both centralized solutions and distributed solutions are investigated. Specifically we try to make use of problem structure in dynamical systems related sparsely interconnected graphs.
Model predictive control
Our research in MPC covers control of linear, non-linear, and hybrid systems. Current focus is on high-performance real-time MPC using tailored algorithms and recent advances in hardware, analysis of closed loop properties of MPC controllers, and development of non-standard MPC formulations to efficiently deal with, e.g., reference tracking and non-linear systems.
Applications
The dominating application areas are aerospace, vehicular systems, and electro-mechanical systems. In particular, we look at clearance of flight control laws and control of heavy duty vehicle platooning. Other applications of interest are control of, e.g., linear induction motors, heat-pumps, and remotely operated underwater vehicles.
Example
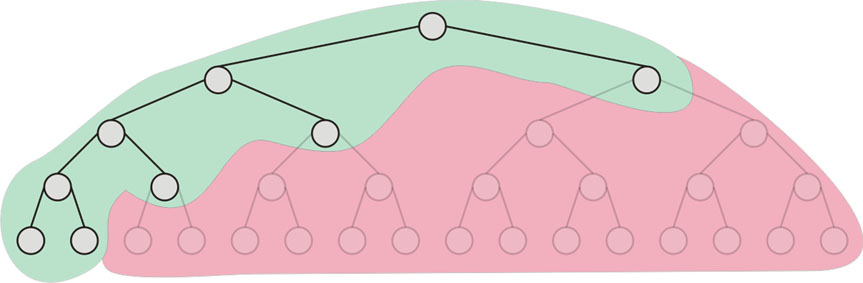
MPC for hybrid systems requires the solution to a Mixed Integer Quadratic (or Linear) Program. Classically these problem are known to have exponential worst case complexity. For a control system that solves these problems on-line, with hard real-time bounds, this is not a very useful bound. Therefore, we have performed research to develop an algorithm that is able to give much better bounds on the actual size of the branch and bound search tree used on-line. In this figure, the parts of the search tree that can be proven never to be explored on-line are marked with red. The green part of the tree can be used as an upper bound for the worst case exploration of the tree.
Informationsansvarig: Anders Hansson
Senast uppdaterad: 2024-08-20
